Memahami Peta Karnaugh (2)
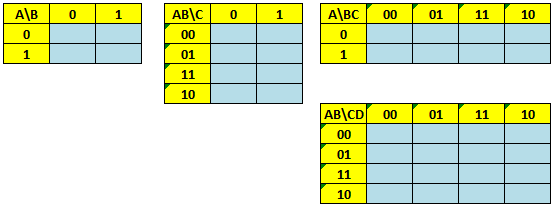
Pendahuluan Pada tutorial sebelumnya , kita telah mempelajari Peta Karnaugh untuk 2, 3 dan 4 peubah ( variable ). Kesempatan ini kita aka...

Pendahuluan Pada tutorial sebelumnya , kita telah mempelajari Peta Karnaugh untuk 2, 3 dan 4 peubah ( variable ). Kesempatan ini kita aka...

Pendahuluan Pada tutorial sebelumnya , kita sudah belajar bagaimana mendeteksi obyek mobil dengan Haarcascade Classifier . Pada tulisan i...

Pendahuluan: Asumsinya pertama kita sudah mengetahui operasi aritmatika dasar (tambah, kurang, kali dan bagi) untuk bilangan biner inte...

Pendahuluan Pendeteksian obyek sangat mudah dilakukan oleh manusia tetapi merupakan tantangan tersendiri oleh sistem berbasis computer vi...